Tele------ Presence

One-way sending and receiving can never constitute sensible telecommunication. It makes distanced people even more anxious if they have no clue if their states are successfully transferred. So, I create this updated version of StandIn that works without distance limitation and sends back the receiver's reaction to the sender in real-time to allow both sides to feel each other.
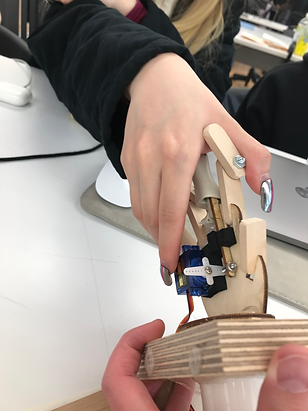
The fake hand 2.0 remakes the glove's gesture as the 1.0 version does, and it also detects if someone touches the fake hand. If the reaction is detected, the fake hand will send the message to the glove through MQTT, and the glove will inform the touched location by vibration and light. For instance, if you send a gesture to a remote fake and someone on the other side holds the finger, the glove will vibrate the finger part to let you know.
Research
If a fake hand is there, showing the gesture of someone, what's your reaction?


Iterations
The first attempt to detect reaction applies two photosensors. One is on the finger, the other is on the palm. When the device is connected, they record the initial sensor readings. When the reading drops more than a certain amount from the initial value, the device assumes the spot is touched because the reactor blocks light on the area.
This is not a perfect solution. Firstly, it only reacts to a very precise tight touch that blocks all the light around. Secondly, it cannot tell what blocks the light. So, it may take the light-off as a touch. Last, The initial value is not always reliable. Even if there is a reset button, the initial value resetting is just a make-up for the occasion it obviously acts weird. Touch switches solve this problem. They are sensitive and accurate.
hard to trigger🥵
sensitive 🧩🤗🙌🏽


To detect finger bending, I used a flex sensor for the early version. It had a lot of noise. I had to set a threshold. Readings less than the threshold are bending, and readings larger than that threshold are not bending. As a result, the finger has only two positions without staying in between. And the unexpected folding positions of the sensor make the reading unstable and set the finger crazy.
The Stretch rubber works a little better but is still noisy. It also requires a lot of testing to determine the threshold. At last, I decide to use a potentiometer to detect bending positions, because its position corresponds directly to the reading.
noisy movement 🥵
unexpected flex 🥵
👌🏽😻🎉📣🤸🏽♀️


Fabrication
The sensors and wires were exposed in the last version. To make people can touch or squeeze it comfortably, I decide to cover the sensors and soften the fakehand interface.

Code
https://github.com/ziiii/Connected-Device/blob/main/MQTT-fakehand.ino
https://github.com/ziiii/Connected-Device/blob/main/MQTT-glove.ino
Next
Except for fixing the mechanical structure that breaks during the show, more importantly, I am going to do some conceptual research about the topic of presence.
What is the point of presence? What makes it preceiveable? What speculation does this scenario lead to? After making the device work, I want to build it in an inspiring way and present the device as a question about Presence.